We want our camera-based system to run on an nVidia Jetson Nano, display a GUI on a monitor and talk to the car via a CAN-USB-interface. It should know its GPS position and be able to turn the steering wheel using a stepper motor.
Guess what my car is missing? All of that. Let’s add it.
Jetson Nano – The brain
I bought a nice metal enclosure for my Jetson Nano SDK from Waveshare. Looks great, feels solid, doesn’t fit anywhere in my car. 3D printer to the rescue!




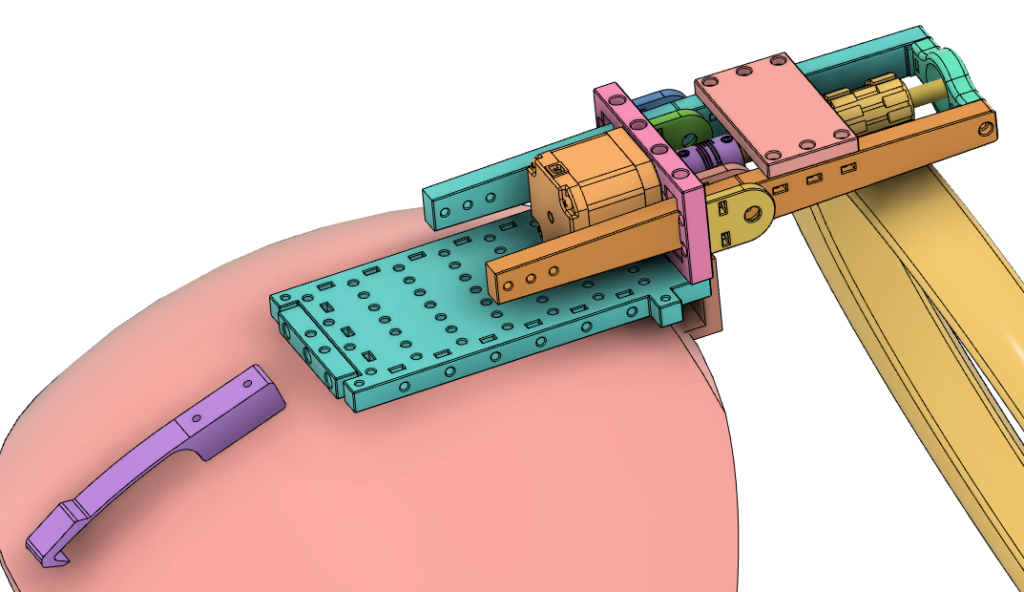
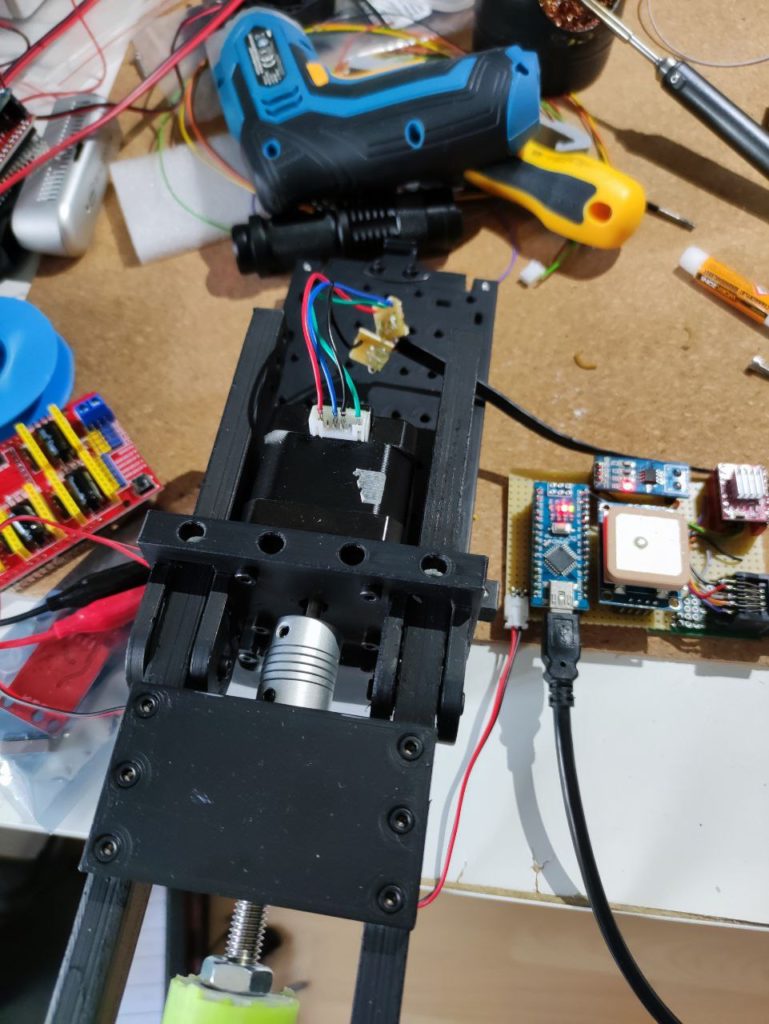
Steering wheel actuator – The brawn
Arguably the most safety critical component. This was designed around the requirement of not interfering with manual driving, unless you keep the lever pressed, pushing the driven rubber roller against the steering wheel. No matter how bad the software freaks out or the electronics fail, the moment you let go of the lever there’s nothing it can do.
It can be easily unplugged and removed, so the car is safe to use in normal traffic again.


Frontfacing camera – The eye
We’re using an Intel RealSense D435 Depth camera. I thought a depth map would be beneficial, but the range is way to short to be useful here. Now it’s just an overpriced USB-camera. Screwholes come in handy though. It’s also low-profile, so it doesn’t obscure the view of the street, as it’s behind the rear mirror from the driver’sperspective.



HDMI Monitor – The… uuh.. face? As in inter-face? No?
This generic 7″ monitor with its driver board was salvaged from an old project. HDMI input, 12V powered, perfect. It has a touch panel, but I lost the USB-driver PCB thingy, too bad. Time for another enclosure.



Power supply
Ok, great, we have all the components there, hooked everything up, hid all the cables, where is my blinking and beeping? Ah, right, power. We need 12V for the monitor and Stepper driver, 5V for the Jetson Nano.
The 12V rail is not super critical, both the monitor and stepper driver survived are happy with the voltages that appear in a vehicle.
For the 5V we need a stable source, as the Jetson Nano can draw quite some current and is very picky about its input voltage. A buck converter rated for 5A should do the job.


Ok, now we basically have a small Linux machine installed in our car. It has no way of talking to the car itself, though. Yet.
1 Antwort zu “DIY Self-Driving Car – Hardware build log”